
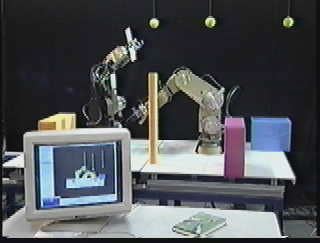
The Ariadne's clew algorithm is a general
pupose path planner based on optimization technics (genetic algorithm).
4 videos demonstrating the capabilities of this algorithm are
proposed. First a 1 Mo MPEG video of the whole demonstration (no
sound), and then 3 videos QuickTime (with commentaries) corresponding
to 3 segments of the previous video.
 Ariadne's
clew algorithm (MPEG, 1Mo)
Ariadne's
clew algorithm (MPEG, 1Mo)
 Ariadne's
clew algorithm, part 1 (QT, 4,3 Mo)
Ariadne's
clew algorithm, part 1 (QT, 4,3 Mo)
 Ariadne's
clew algorithm, part 2 (QT, 2,1 Mo)
Ariadne's
clew algorithm, part 2 (QT, 2,1 Mo)
Ariadne's
clew algorithm, part 2 (QT, 6,5 Mo)
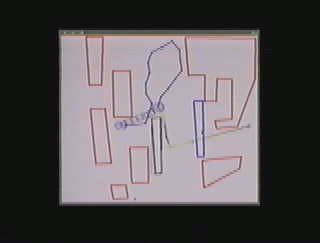
A demo Program of a motion planner for an holonomic mobile robot using the Ariandn'es Clew Algorithm is also offered.